力是什么?
力是物体间的相互机械作用,这种作用使物体的运动状态发生改变(外效应),或使物体产生变形(内效应)。力使物体运动状态改变的效应称为力的运动效应,使物体产生变形的效应称为力的变形效应。
力对物体作用的效应取决于力的三要素,即力的大小、方向、作用点。 (1.这种矢量又叫什么?定位矢。2.力一定是定位矢吗?为什么?)
度量力的大小通常采用国际单位制(SI), 力的单位用牛顿(N)或千牛顿(kN)。
注意向量和标量的区分。教材:F,F, 作业:F,F
第一个公理是力的平行四边形法则,两个力
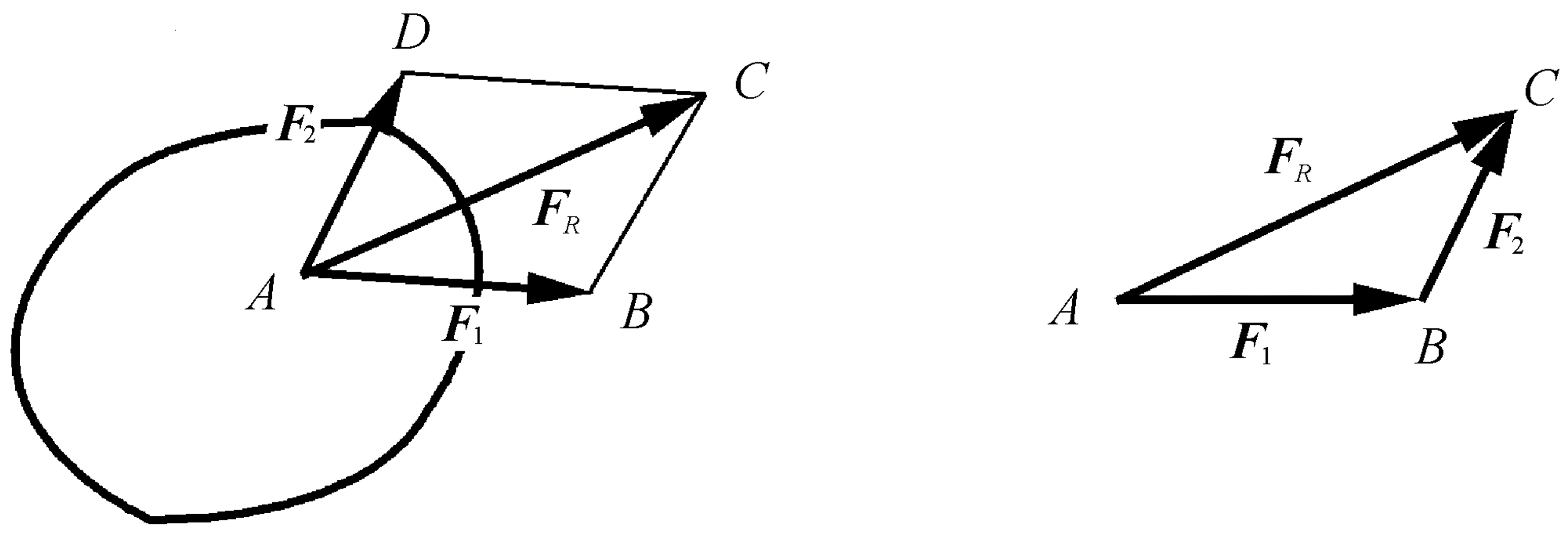 FR=F1+F2
FR=F1+F2 第二个公理是二力平衡的条件。 作用在刚体上的两个力,使刚体保持平衡的必要和充分条件是:这两个力的大小相等,方向相反,且作用在同一直线上。
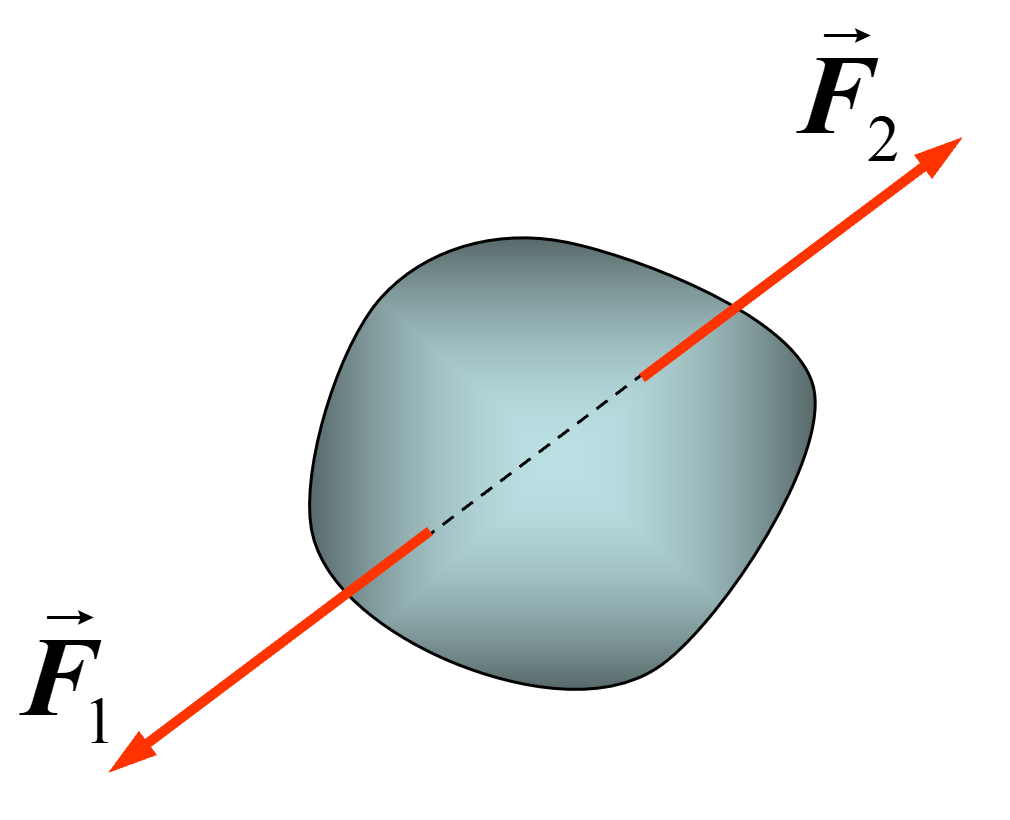
使刚体平衡的充分必要条件:
F1=−F2 最简单力系的平衡条件。
在任一力系中加上一个平衡力系,或从其中减去一个平衡力系,所得新力系与原力系对于刚体的运动效应相同。
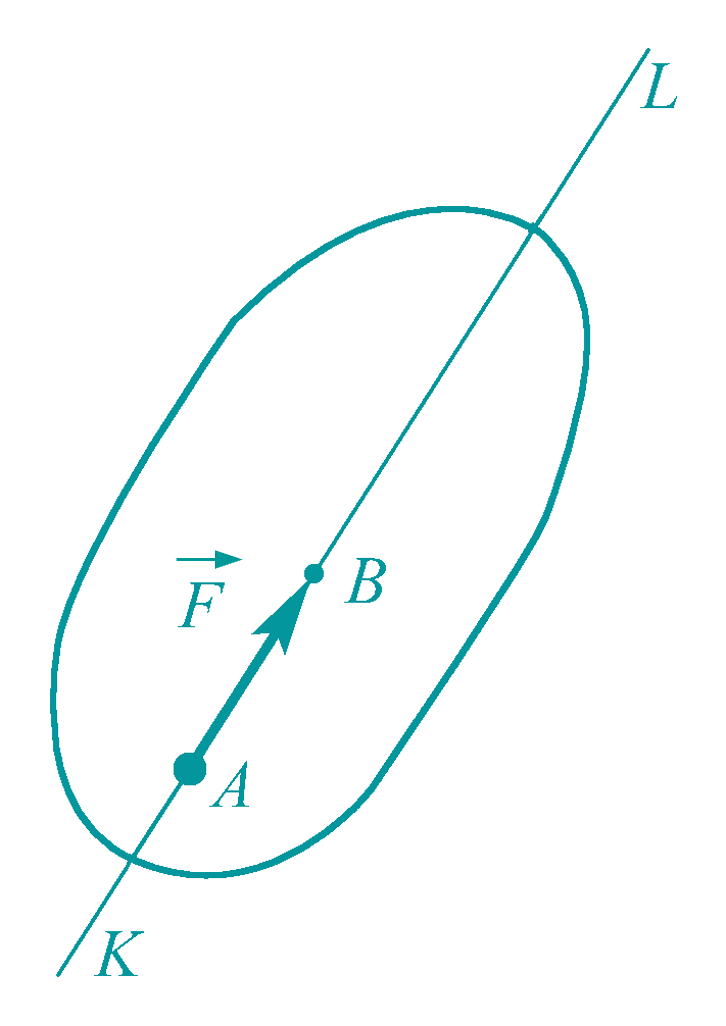
推理: 力的可传性 作用在刚体上的力是滑动矢量,力的三要素为大小、方向和作用线
作用力和反作用力总是同时存在,同时消失,等值、反向、共线,作用在相互作用的两个物体上.
F=−F′ 变形体在某一力系作用下处于平衡,如将此变形体刚化为刚体,其平衡状态保持不变。
反之不一定成立,因对刚体平衡的充分必要条件,对变形体是必要的但非充分的。
F=F12+F3=F1+F2+F3 分解式F=Fxi+Fyj+Fzk
投影Fx=F⋅i,Fy=F⋅j,Fz=F⋅k
Fx=Fcosα, Fy=Fcosβ,Fz=Fcosγ 力在任意轴上的投影
Ft=F⋅n=Fxcosα+Fycosβ+Fzcosγ F=Fxcosα+Fyβ+Fzγ n=cosαi+cosβj+cosγk 在直接知道F和各个坐标的夹角,利用上述的直接投影法可以很容易得到F在各个坐标轴上的投影。 但是如果仅仅知道F和轴与一个平面的夹角φ和θ,则可以利用二次投影法来进行投影。 二次投影法求投影的解析表达式为:
FxFyFz=F′cosθ=Fsinγcosθ=F′sinθ=Fsinγsinθ=Fcosγ 若已知力在x、y、z轴上的投影 ,则可求得F的大小及方向余弦:
F=Fx2+Fy2+Fz2 cosα=FFx, cosβ=FFy, cosγ=FFz, 物理学中已经阐明,力对点之矩是力使物体绕某一点转动效应的量度。这一点称为力矩中心,简称矩心。
力矩的大小(N·m):M0(F)=Fa
力矩有转向(方向),应是矢量(定位矢)
MO(F)=r×F
